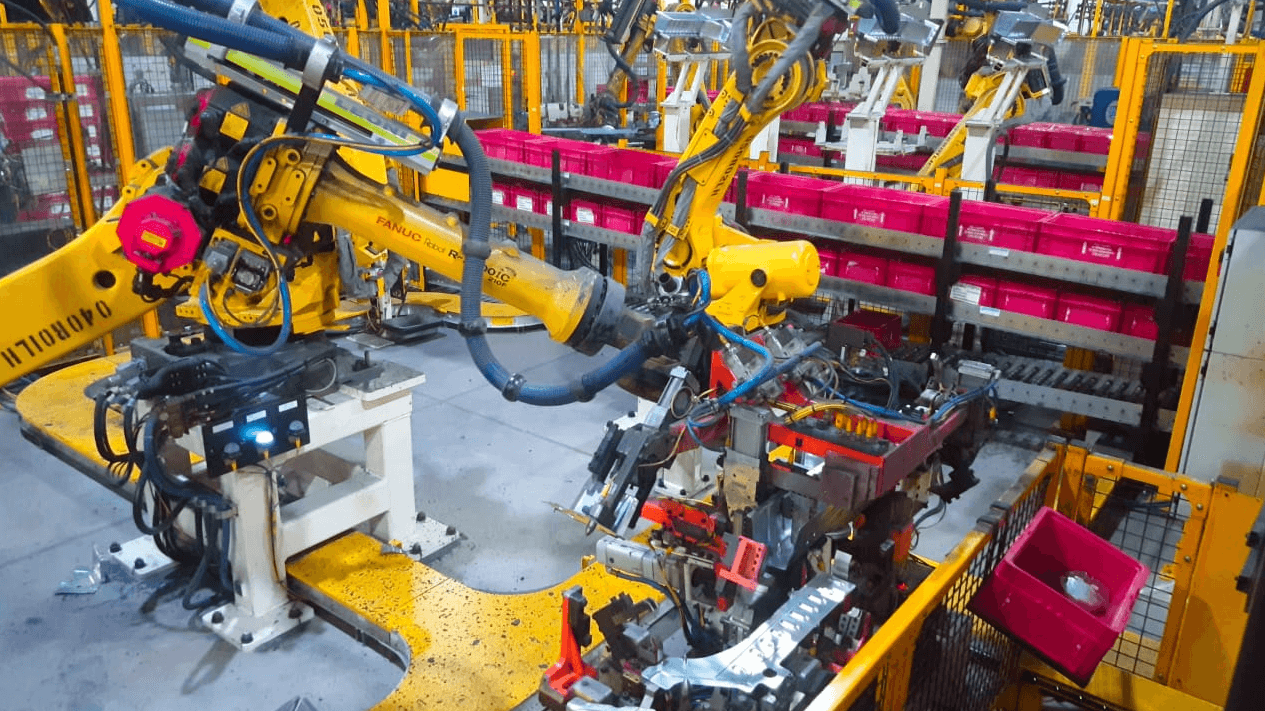
Robot Programming
FANUC, ABB, KUKA, and Universal Robots integration for material handling, welding, fastening, and bin picking — programmed and validated in simulation before we ever touch the real robot.
Robot Programming Across the Application
Material Handling
Pick, place, and transfer between processes — synchronized with upstream and downstream equipment.
Resistance Welding
Multi-gun resistance welding cells, including weld schedule setup and cycle time tuning.
MIG Welding
Seam tracking, weld path development, and torch angle optimization for consistent welds.
Fastener Applications
Screw driving, riveting, and clinching cycles integrated with part presence verification.
Bin Picking
Vision-guided picking from unstructured bins, including pose estimation and collision-free path planning.
End-of-Arm Tooling
EOAT design coordination and integration — grippers, weld guns, and multi-tool changers.
Validated in Simulation, Before It Costs You Floor Time
Reach, cycle time, and collision checks happen in simulation first — not during commissioning. We model the cell, run the program through its full cycle, and catch interference, timing conflicts, and unreachable points before the robot is ever powered on for real. That means less floor time spent debugging, and fewer surprises when the cell goes live.
A Robot Program Doesn't Run on Its Own
Multi-Robot Cell Coordination
Synchronized motion and signal handshaking between robots sharing a cell, so paths and cycle times don't collide.
Safety Zoning
Light curtains, area scanners, and interlocked zones planned around real robot reach — not assumed clearance.
PLC & HMI Integration
Robot I/O, fault handling, and status reporting wired into the cell's PLC and HMI, not left as a black box.
Tooling & EOAT Integration
Robot programs developed alongside the tooling and EOAT drawings, so the program matches what's actually built.
- • New robot cell commissioning
- • Existing program modification or optimization
- • Robot system debug and production support
- • Cell layout or reach study before equipment is purchased
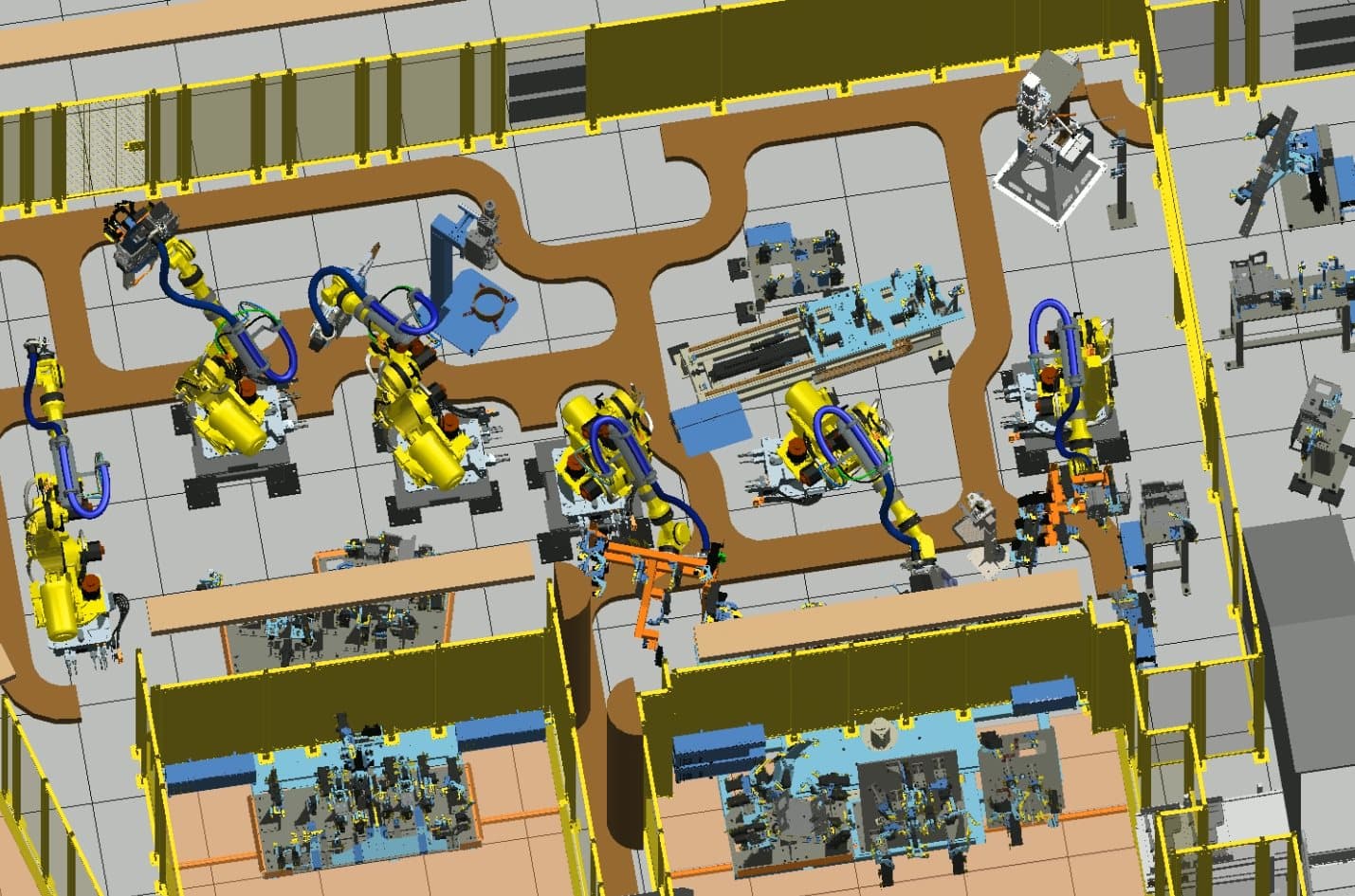
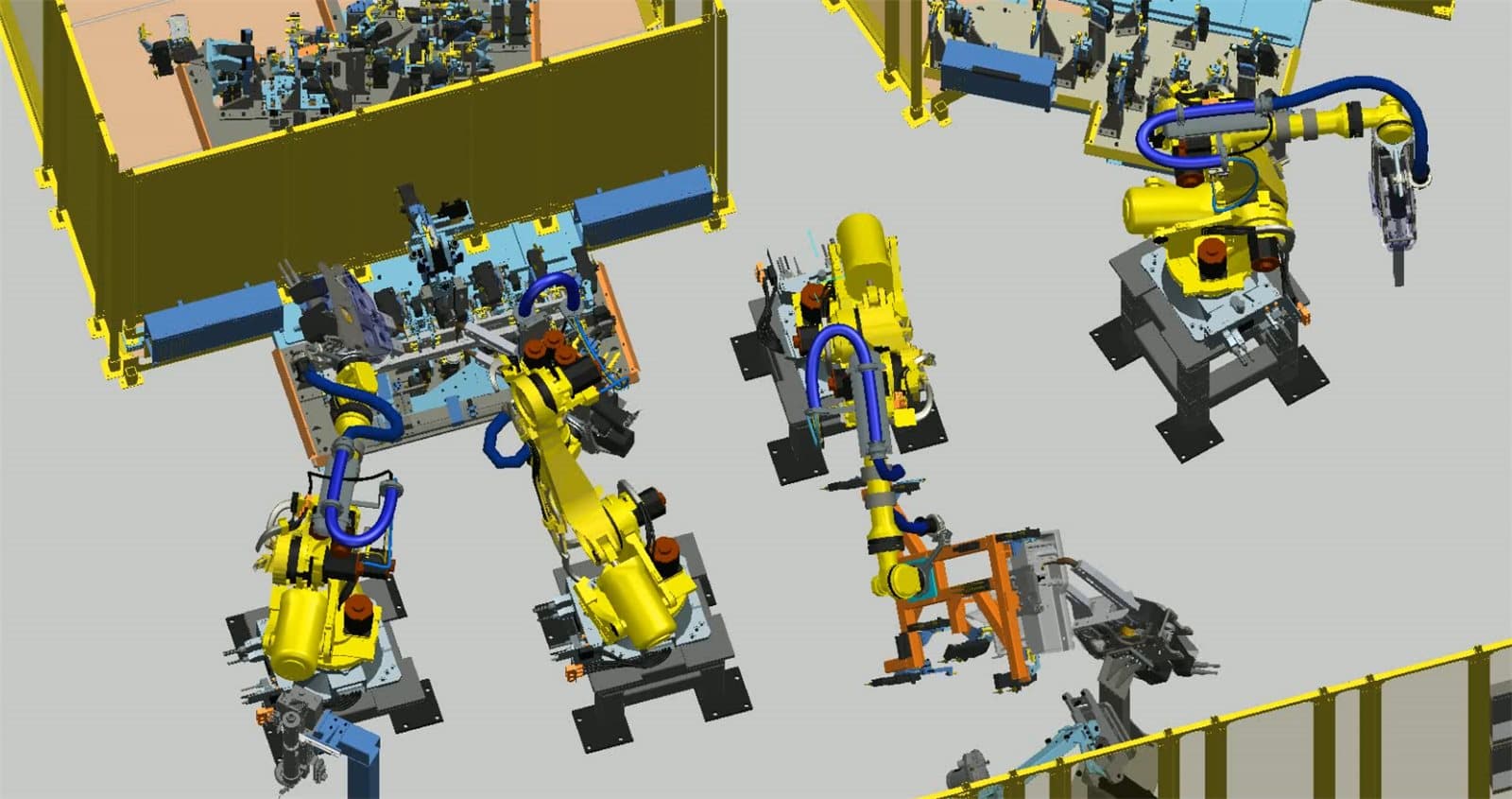
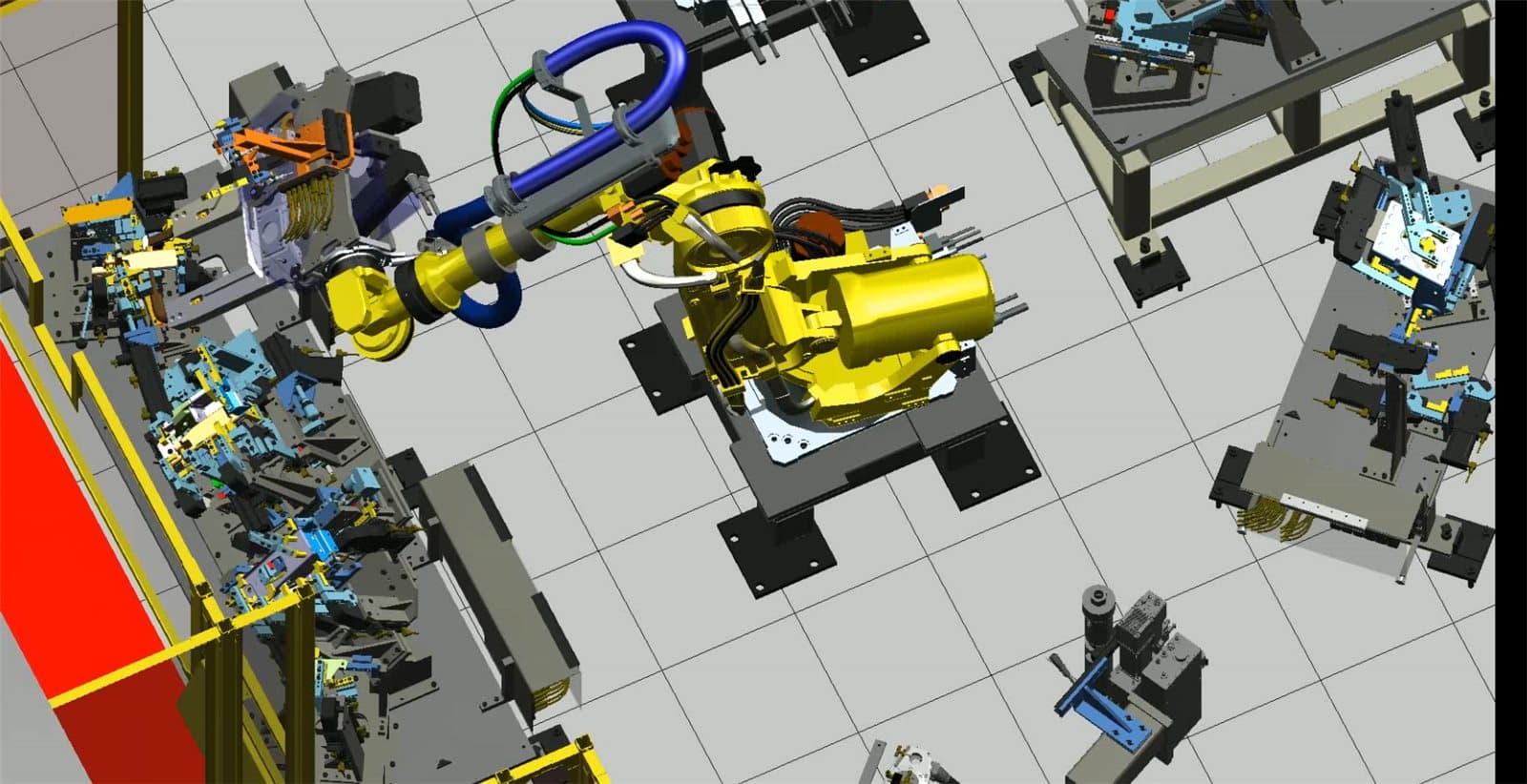
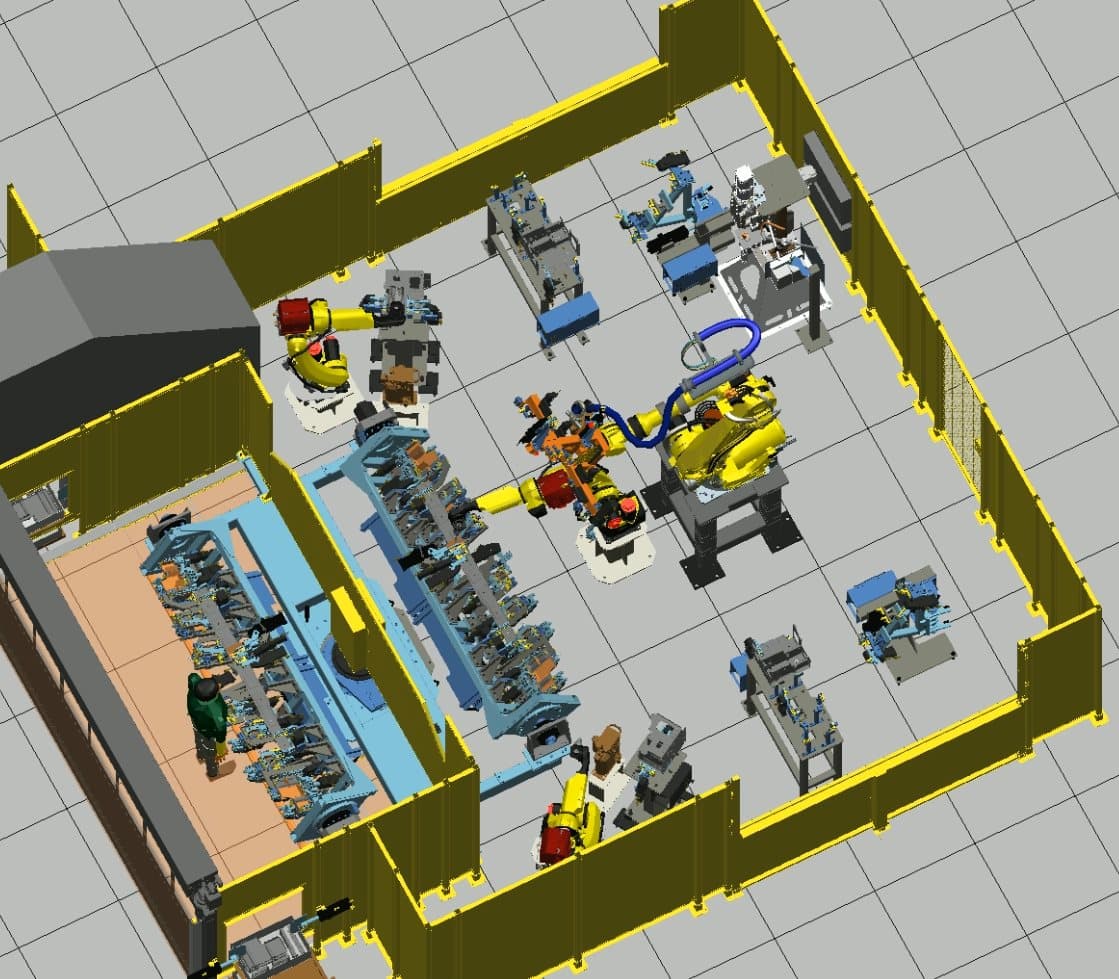
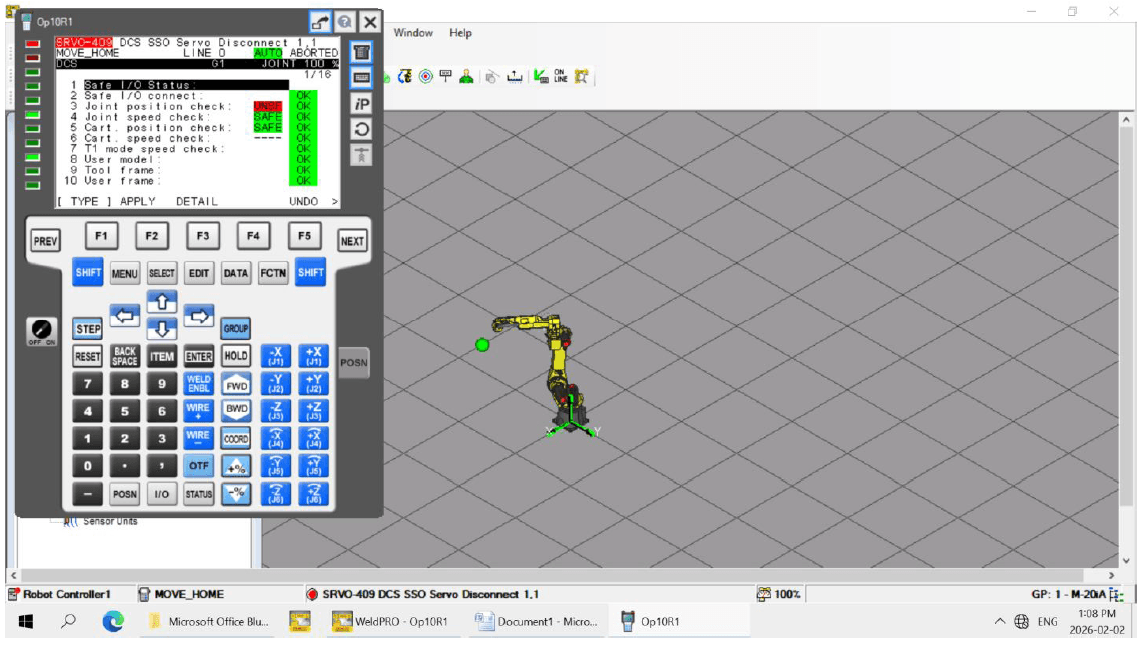
Cell Simulations From Real Projects
These are simulation renders used to plan and validate real robot cells before commissioning. Photos of robots being programmed on the shop floor are coming soon.
Common Questions
Which robot brands do you program?
FANUC, ABB, KUKA, and Universal Robots. If your cell runs a different platform, ask — most industrial robot languages translate well once we've worked in one.
Do you simulate the program before touching the real robot?
Wherever possible. Simulating reach, cycle time, and collisions ahead of time means less time spent debugging on the floor and fewer surprises at commissioning.
Can you program a cell with multiple robots working together?
Yes — synchronized multi-robot welding and material handling cells are some of our most common work. Signal handshaking and motion coordination are planned in, not bolted on after.
Do you handle the end-of-arm tooling too?
We coordinate EOAT integration and can produce the tooling drawings alongside the robot program, so what's programmed matches what's actually built.
Ready to Discuss Your Project?
We work with plant managers, OEMs, and integrators across Ontario. Let's talk about what you need.
+1 (905) 960-9535company@gohncontrols.comSend Us a Message